




The system helps self-driving cars see road users, follow rules, avoid accidents, drive, and keep walkers and cyclists safe.
Researchers at the Hong Kong University of Science and Technology (HKUST) have developed a cognitive encoding framework that helps self-driving cars make decisions like human drivers. The system improves how autonomous vehicles handle traffic with many road users.
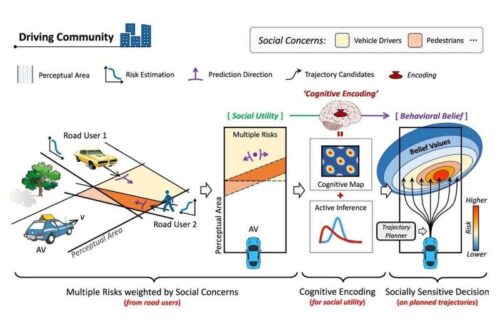
The system uses individual risk assessment to evaluate each road user, such as pedestrians, cyclists, motorcyclists, and vehicles. It calculates risk based on speed, distance, and behavior predictability. For example, a child walking near the road is treated as a high-priority case.

It includes a socially weighted risk map, which adds an ethical layer to navigation. The vehicle prioritizes the safety of vulnerable road users, yielding to pedestrians even when traffic rules permit it to move forward. Another part of the system predicts how the vehicle’s actions will affect others. It estimates whether movements like a lane change may lead to braking or disrupt traffic flow.
Unlike existing systems that assess risks between two objects, this framework considers multiple road users and shifting priorities, similar to human decision-making. It adjusts behavior based on local traffic rules and expectations. This allows the system to operate in regions with different legal and cultural traffic practices.
In tests across 2,000 traffic scenarios, the framework reduced traffic risk by 26.3%. It also increased driving efficiency, with vehicles completing tasks 13.9% faster. This approach improves safety for all road users, especially pedestrians and cyclists. Autonomous vehicles respond to changing conditions, reducing accidents and making driving smoother.
Since it adapts to local driving behavior, the system supports deployment of autonomous vehicles in different regions. The research team is building a dataset of driving patterns and working with partners to prepare for field tests and integration.
Reference: Hongliang Lu et al, Empowering safer socially sensitive autonomous vehicles using human-plausible cognitive encoding, Proceedings of the National Academy of Sciences (2025). DOI: 10.1073/pnas.2401626122

