



Researchers at Carnegie Mellon University have made Zippy, a two-legged robot as tall as a LEGO figure. It can move almost as fast as a human runner.
Bipedal robots, which walk on two legs like humans, are among ground-based machines. They excel at navigating terrain far better than wheeled or tracked robots. However, bipedal robots remain rare due to the difficulty and cost involved in designing and controlling them. Their sensing and navigation systems are more complex, leading to more frequent failures.
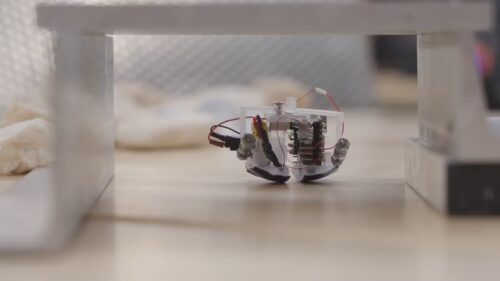
A research team at Carnegie Mellon University has made bipedal robots more reliable and easier to control. To explore possibilities, they are starting on a smaller scale than usual. They have created what they believe is the world’s smallest bipedal robot. Named Zippy, this robot stands as tall as a LEGO minifigure, though it is wider.

Zippy’s movement is powered by a single motor and controlled by a Seeed Studio XIAO microcontroller board. While this setup results in an awkward and wobbly gait, it remains effective.
Despite standing less than 1.5 inches tall, Zippy can do more than just walk. It can start from a standstill, turn, skip, and climb steps—all thanks to a mechanical design. The robot’s front leg lifts to shift its center of gravity, and the feet help swing the rear leg forward for a full step. A mechanical hard stop acts as a joint limit for the hip, controlling the motion.
At an average speed of 10 leg lengths per second—about half a mile per hour—Zippy lives up to its name. If humans moved at the same speed, we’d be moving at 19 miles per hour.
The researchers see uses for Zippy in search and rescue, industrial inspections, and scientific exploration, where its size lets it reach spaces inaccessible to larger robots. Their next goal is to equip Zippy with sensors, including cameras, to enable autonomous navigation and localization. With these changes, multiple Zippy robots could work together as a swarm, exploring environments unsafe for humans.

